Mengsen Zhang, Ph.D.
complex systems and brain sciences
Project maintained by mengsenz Hosted on GitHub Pages — Theme by mattgraham
Human-Virtual Partner interaction
I have conducted a series of experiments to look “within” the person during social coordination, using a recently developped paradigm named the Human Dynamic Clamp (here). In the paradigm, a person coordinate his/her movement with a “Virtual Partner” (VP), whose movement is driven by a empirically grounded model of human coordination (Haken-Kelso-Bunz equations). The nice thing is that we can quantitatively set the boundary conditions of the dyadic coordination by choosing model parameters.
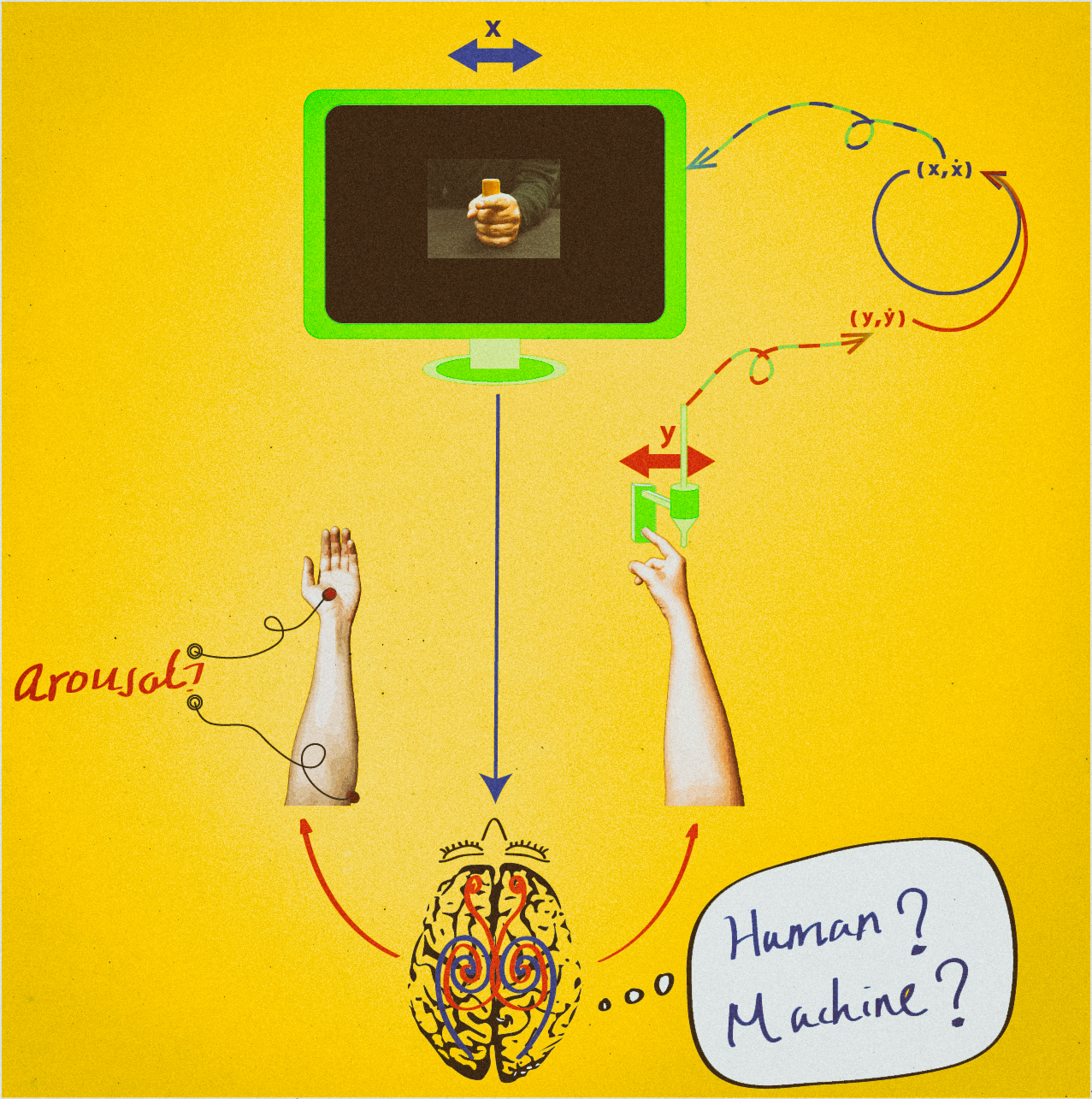
I first used it to study how emotional arousal (measured by skin potential response) in human particpants was affected by social coordination and found that humans had greater emotional responses when their coordination with the VP was stable and when they thought the VP’s behavior was controlled by a human (they did not know it was controlled by the model all the time). This work has been published here. Two more experiments were done with participants’ neural activities (EEG, fMRI) recorded. The data analyses is ongoing.